Design Portfolio
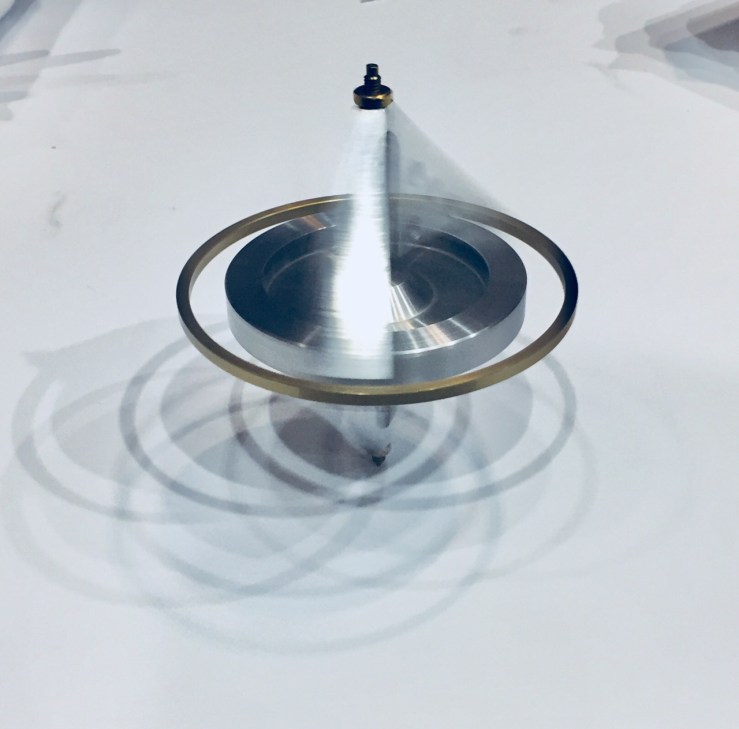
Gyroscope
Assignment: Build a Gyroscope to the specifications provided in the given SolidWorks part files, limited modifications allowed. The Gyroscope was held upright and mechanically driven to a starting rotation speed of 1680 rpm and released to a hard smooth base surface. The elapsed time was recorded until Gyro frame touches base surface. I was extremely careful while machining… Continue reading Gyroscope

Mars Rover Happy Meal Toy
For an Engineering Innovation class (Fall 2016), I was part of a project team tasked with designing, creating, and proposing a formal marketing pitch for a Happy Meal Toy. I designed the axle-group and wheels, and collaborated with my group mates to negotiate critical-to-fit dimensions. Our initial ideation process revolved around what type of toy… Continue reading Mars Rover Happy Meal Toy
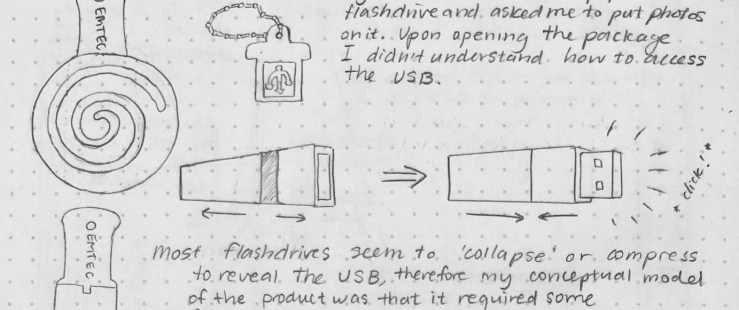
Thoughts on Flash(drive)
11/21/17 Below are some thoughts on a flash-drive design which is not very intuitive to operate. I have created some sketches of the problem and potential solutions:
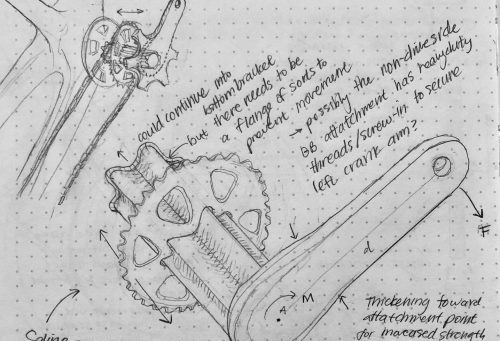
Variable 1x MTB Gear Concept
11/24/17 How great would it be to have a mountain bike with a 1x cog in the front and have perfect chain line no matter what gear you’re in? Here’s a variable 1x gear concept I drew out that could allow just that:
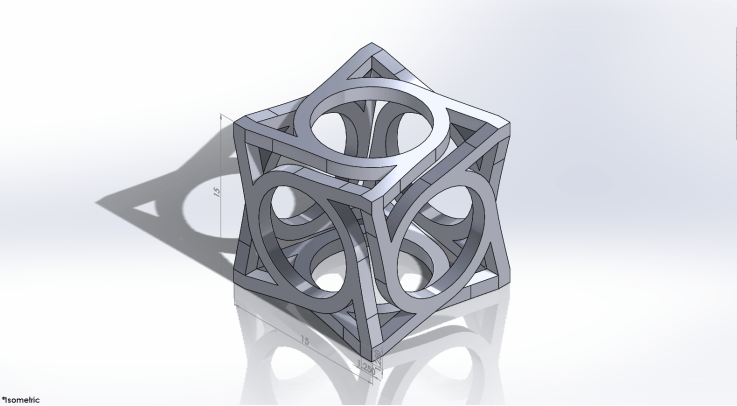
Mechanical Metamaterial Twist Structure
February 2018 The initial design was published in an article by Frenzel, Kadic, and Wegener called, “Three-dimensional mechanical metamaterials with a twist” (2017). Unlike most materials, this structure naturally produces a torque when a downward force is applied. We will attempt to replace the joint-arms with artificial muscles in order to initiate a twisting motion… Continue reading Mechanical Metamaterial Twist Structure
Soft-Robotics Muscle
The goal of this design was to create an artificial muscle capable of gripping and contracting in several directions. This is part of ongoing research for Jiefeng Sun’s doctoral thesis through Colorado State University’s Robotics Lab. I contributed to Jiefeng’s research through January and February of 2018. In order to initiate artificial muscle movement in… Continue reading Soft-Robotics Muscle

Climbing Rope Bag
March 13, 2018 Rather than buying a rope-bag, I decided to design and create two of my own – one as a gift and one for myself. The design was informed primarily by the shape of my coiled rope, which is generally a long and narrow bundle. The bag itself reflects this, and has room… Continue reading Climbing Rope Bag
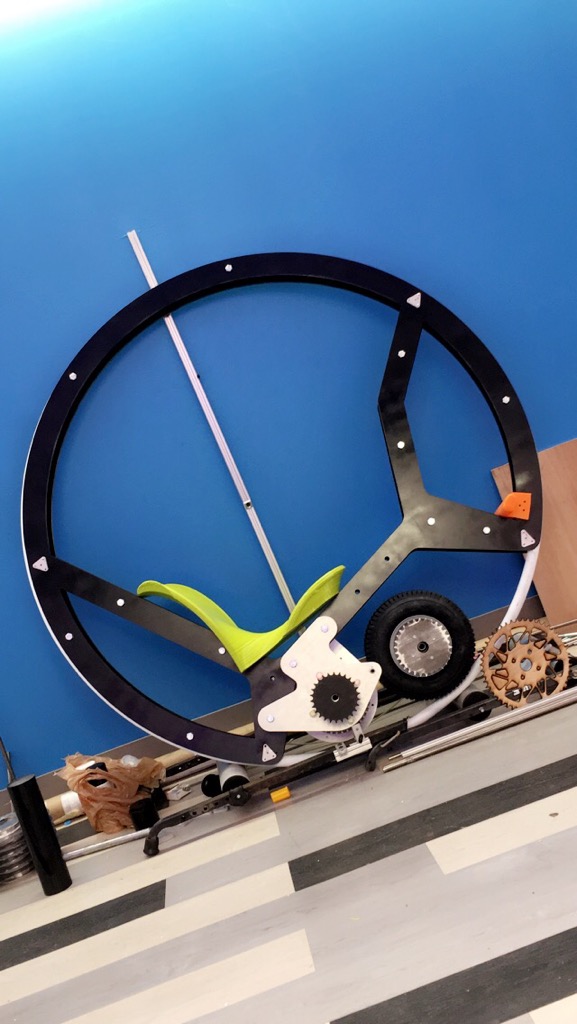
EV360 Photos
Evidence of progress from January 2019 until present.
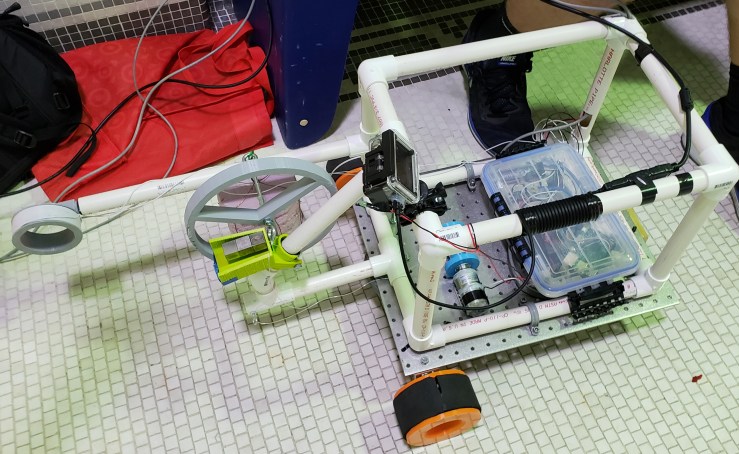
Submersible Robot
10/12/2018 In a team of 6, we were tasked to design, prototype, and test an underwater robot capable of distinguishing and retrieving three objects from the bottom of a pool. I spearheaded the tread-and-wheel-base design and prototyping. I am also responsible for the for documentation for this project: from sketches, through SolidWorks files, to testing… Continue reading Submersible Robot

EV360: Monowheel – Seat
The EV360 project has many components, not least of which is the seat. Due to the aggressive position that our team driver will adopt, it is imperative that the seat feels as though it provides sufficient stabilization for the driver while maintaining an aerodynamic form factor; the solution space lies somewhere in between a road-bike… Continue reading EV360: Monowheel – Seat
